 Catalogue PIGMA
Catalogue PIGMA
100 mètre
Type of resources
Available actions
Topics
Provided by
Years
Formats
Representation types
Update frequencies
status
Scale
Resolution
-
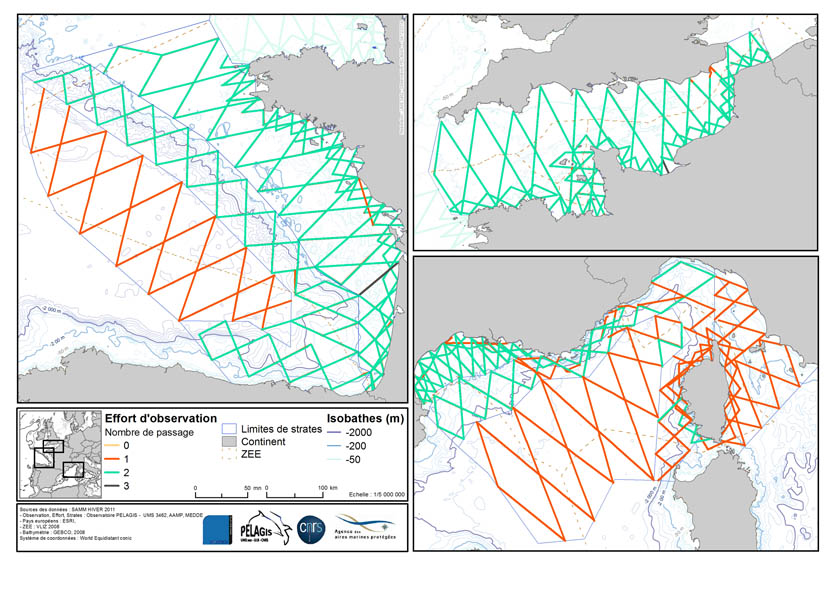
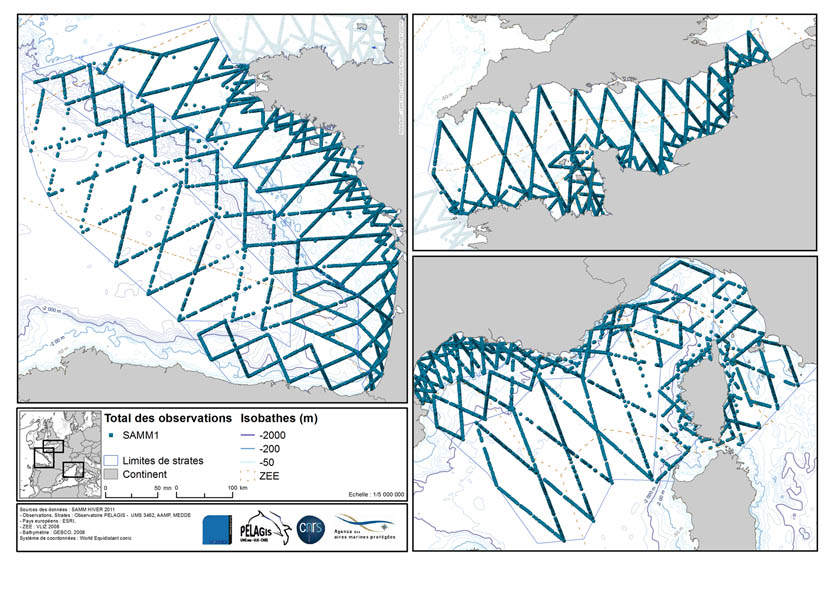
La donnée associée met en évidence l'effort d'observation réalisé lors de la campagne d'acquisition de données d'Observation sur plateforme aérienne SAMM1 (Suivi aérien de la Mégafaune Marine) réalisée par l'Observatoire PELAGIS. L'effort d'observation est matérialisé sous la forme d'un linéaire calqué sur les transects prévus. Description de la table attributaire : region char 30 Zone d'étude platform char 10 Plateforme d'observation : ovipa/ovibat survey char 15 Nom de la campagne computer char 5 Identifiant du système sur lequel le vol est effectué sector char 10 Secteur d'échantillonnage strate char 5 Strate d'échantillonnage transectN char 10 Transect d'échantillonnage crossNb int Nombre de passage sur le transectN effortGrp char 20 Numéro du groupe d'effort leg char 70 Numéro d'effort txt leg_id int Numéro d'effort (pour un LEG uniquement) left char 5 Arrière gauche (position gauche sur une plate-forme simple) right char 5 Arrière droit (position droite sur une plate-forme simple) navigator char 5 Navigateur (position centrale) beginTime char 20 Temps auquel a été commencé le parcours endTime char 20 Temps auquel s'est terminé le parcours status char 5 Status du parcours seaState char 5 Code pour l'état de la mer selon l'échelle de Beaufort cloudCover char 5 Couverture nuaugeuse défini par le système des octats (0 pour dégagé < 8 pour complètement couvert) glareFrom char 5 Début de la zone d'éblouissement en degré (le nez de l'avion 0°) glareTo char 5 Fin de la zone d'éblouissement en degré (le nez de l'avion 0°) glareSeverity char 5 ntensité d'éblouissement (0 aucun éblouissement < 3 éblouissement fort) turbidity char 5 Turbidité/transparence de l'eau (0 eau claire < 2 eau turbide, 9 turbidité inconnue) subjective char 20 Détectabilité. Estimation des observateurs en fonction des autres paramètres si les conditions sont bonnes ou non. Il s'agit de deux lettres, une pour le côté gauche et une pour le côté droit. (E excellentes, G bonnes, M moyennes et P pauvres). comment char 400 Commentaires sur le parcours lat double Latitude géographique en degré décimal du début du parcours lon double Longitude géographique en degré décimal du début du parcours latEnd double Latitude géographique en degré décimal de la fin du parcours lonEnd double Longitude géographique en degré décimal de la fin du parcours lengthKm double Longueur de l'effort en km engin char 30 Immatriculation de l'avion utilisé pour le vol speed int Vitesse (km/h) lors de la capture altitude char 15 Altitude (feet) lors de la capture coordN char 15 Code EPSG du système de coordonnées dans lequel les valeurs de distance ont été calculées
-
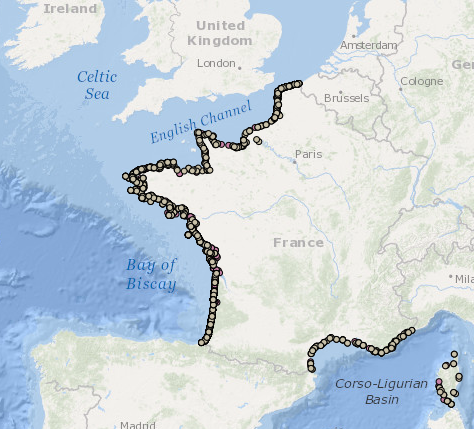
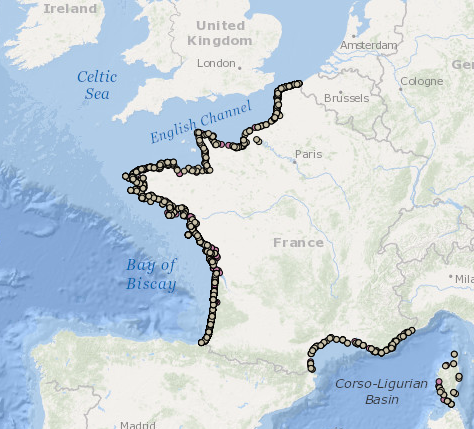
Données d’occurrence des échouages de mammifères marins collectées par les correspondants du Réseau National Echouages (date, position, espèce) en métropole en 2014-2020. cd_nom: code de l'espèce observée selon taxref lb_nom: nom latin de l'espèce observée selon taxref nom_commun: nom commun de l'espèce observée selon taxref date_obs: jj/mm/aaaa, date de l'observation de l'animal échoué com_codes_insee: code de la commune de l'échouage selon l'INSEE com_nom: nom de la commune selon l'INSEE com_coord_lat: y en degrés décimaux de la commune de l'échouage com_coord_long: x en degrés décimaux de la commune de l'échouage id_mammifere: référence de l'animal dans la base de données Pelagis identiteObservateur: nom du correspondant ayant effectué l'observation organismeObservateur: organisme du correspondant ayant effectué l'observation organismeGestionnaireDonnees: organisme assurant la gestion de la base de données
-
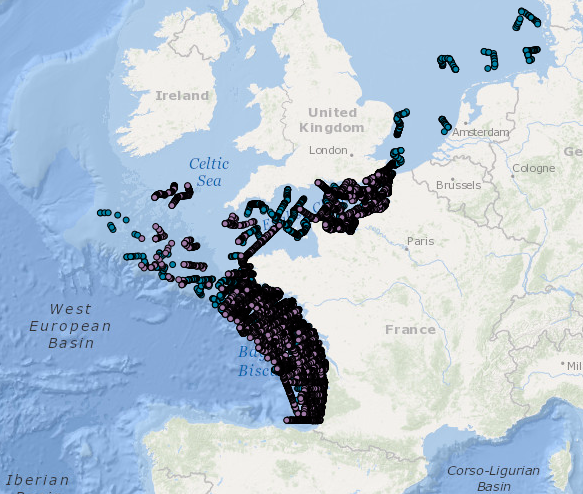
Données d’occurrence des observations de mammifères marins, oiseaux et autre mégafaune marine collectées par le dispositif Megascope sur les campagnes halieutiques et océanographiques (date, position, espèce). jour: jour de l'observation mois: mois de l'observation an: année de l'observation Latitude: y en degrés décimaux Longitude : x en degrés décimaux nom_latin: nom latin de l'espèce identifiée selon taxref cd_ref: code de l'espèce selon taxref v8.0 Survey: nom de la campagne identiteObservateur: nom de l'observateur ayant réalisé l'observation organismeObservateur: nom de l'organisme ayant réalisé l'observation organismeGestionnaireDonnees: nom de l'organisme assurant la gestion de la base de données
-
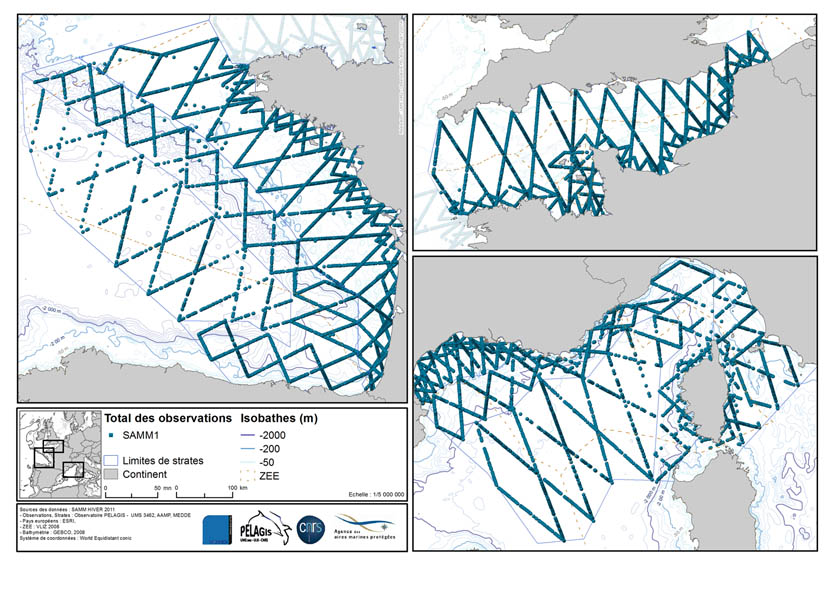
La donnée associée met en évidence les observations réalisées lors de la campagne d'acquisition de données d'Observation sur plateforme aérienne SAMM1 (Suivi aérien de la Mégafaune Marine) réalisée par l'Observatoire PELAGIS. Observations visuelles sur plateforme aérienne dédiée.
-
La donnée associée met en évidence les observations réalisées lors de la campagne d'acquisition de données d'Observation sur plateforme aérienne SAMM2 (Suivi aérien de la Mégafaune Marine) réalisée par l'Observatoire PELAGIS.
-
La donnée associée met en évidence les observations réalisées lors de la campagne d'acquisition de données d'Observation sur plateforme aérienne SAMM1 (Suivi aérien de la Mégafaune Marine) réalisée par l'Observatoire PELAGIS.
-
Données d’occurrence des échouages de mammifères marins collectées par les correspondants du Réseau National Echouages (date, position, espèce) en métropole en 2016-2020. cd_nom: code de l'espèce observée selon taxref lb_nom: nom latin de l'espèce observée selon taxref nom_commun: nom commun de l'espèce observée selon taxref date_obs: jj/mm/aaaa, date de l'observation de l'animal échoué com_codes_insee: code de la commune de l'échouage selon l'INSEE com_nom: nom de la commune selon l'INSEE com_coord_lat: y en degrés décimaux de la commune de l'échouage com_coord_long: x en degrés décimaux de la commune de l'échouage id_mammifere: référence de l'animal dans la base de données Pelagis identiteObservateur: nom du correspondant ayant effectué l'observation organismeObservateur: organisme du correspondant ayant effectué l'observation organismeGestionnaireDonnees: organisme assurant la gestion de la base de données
-
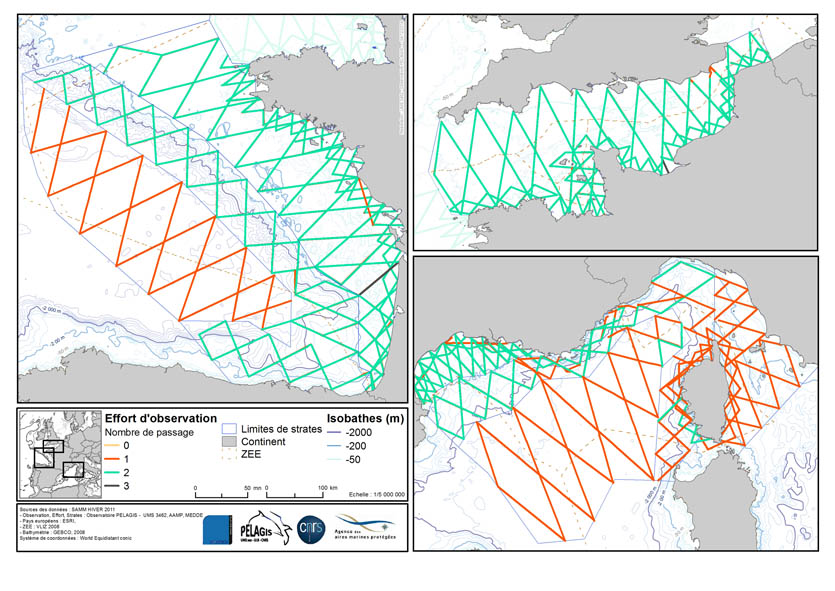
La donnée associée met en évidence l'effort d'observation réalisé lors de la campagne d'acquisition de données d'Observation sur plateforme aérienne SAMM2 (Suivi aérien de la Mégafaune Marine) réalisée par l'Observatoire PELAGIS. L'effort d'observation est matérialisé sous la forme d'un linéaire calqué sur les transects prévus. Description de la table attributaire : region char 30 Zone d'étude platform char 10 Plateforme d'observation : ovipa/ovibat survey char 15 Nom de la campagne computer char 5 Identifiant du système sur lequel le vol est effectué sector char 10 Secteur d'échantillonnage strate char 5 Strate d'échantillonnage transectN char 10 Transect d'échantillonnage crossNb int Nombre de passage sur le transectN effortGrp char 20 Numéro du groupe d'effort leg char 70 Numéro d'effort txt leg_id int Numéro d'effort (pour un LEG uniquement) left char 5 Arrière gauche (position gauche sur une plate-forme simple) right char 5 Arrière droit (position droite sur une plate-forme simple) navigator char 5 Navigateur (position centrale) beginTime char 20 Temps auquel a été commencé le parcours endTime char 20 Temps auquel s'est terminé le parcours status char 5 Status du parcours seaState char 5 Code pour l'état de la mer selon l'échelle de Beaufort cloudCover char 5 Couverture nuaugeuse défini par le système des octats (0 pour dégagé < 8 pour complètement couvert) glareFrom char 5 Début de la zone d'éblouissement en degré (le nez de l'avion 0°) glareTo char 5 Fin de la zone d'éblouissement en degré (le nez de l'avion 0°) glareSeverity char 5 ntensité d'éblouissement (0 aucun éblouissement < 3 éblouissement fort) turbidity char 5 Turbidité/transparence de l'eau (0 eau claire < 2 eau turbide, 9 turbidité inconnue) subjective char 20 Détectabilité. Estimation des observateurs en fonction des autres paramètres si les conditions sont bonnes ou non. Il s'agit de deux lettres, une pour le côté gauche et une pour le côté droit. (E excellentes, G bonnes, M moyennes et P pauvres). comment char 400 Commentaires sur le parcours lat double Latitude géographique en degré décimal du début du parcours lon double Longitude géographique en degré décimal du début du parcours latEnd double Latitude géographique en degré décimal de la fin du parcours lonEnd double Longitude géographique en degré décimal de la fin du parcours lengthKm double Longueur de l'effort en km engin char 30 Immatriculation de l'avion utilisé pour le vol speed int Vitesse (km/h) lors de la capture altitude char 15 Altitude (feet) lors de la capture coordN char 15 Code EPSG du système de coordonnées dans lequel les valeurs de distance ont été calculées
-
La donnée associée met en évidence l'effort d'observation réalisé lors de la campagne d'acquisition de données d'Observation sur plateforme aérienne SAMM1 (Suivi aérien de la Mégafaune Marine) réalisée par l'Observatoire PELAGIS. L'effort d'observation est matérialisé sous la forme d'un linéaire calqué sur les transects prévus. Description de la table attributaire : region char 30 Zone d'étude platform char 10 Plateforme d'observation : ovipa/ovibat survey char 15 Nom de la campagne computer char 5 Identifiant du système sur lequel le vol est effectué sector char 10 Secteur d'échantillonnage strate char 5 Strate d'échantillonnage transectN char 10 Transect d'échantillonnage crossNb int Nombre de passage sur le transectN effortGrp char 20 Numéro du groupe d'effort leg char 70 Numéro d'effort txt leg_id int Numéro d'effort (pour un LEG uniquement) left char 5 Arrière gauche (position gauche sur une plate-forme simple) right char 5 Arrière droit (position droite sur une plate-forme simple) navigator char 5 Navigateur (position centrale) beginTime char 20 Temps auquel a été commencé le parcours endTime char 20 Temps auquel s'est terminé le parcours status char 5 Status du parcours seaState char 5 Code pour l'état de la mer selon l'échelle de Beaufort cloudCover char 5 Couverture nuaugeuse défini par le système des octats (0 pour dégagé < 8 pour complètement couvert) glareFrom char 5 Début de la zone d'éblouissement en degré (le nez de l'avion 0°) glareTo char 5 Fin de la zone d'éblouissement en degré (le nez de l'avion 0°) glareSeverity char 5 ntensité d'éblouissement (0 aucun éblouissement < 3 éblouissement fort) turbidity char 5 Turbidité/transparence de l'eau (0 eau claire < 2 eau turbide, 9 turbidité inconnue) subjective char 20 Détectabilité. Estimation des observateurs en fonction des autres paramètres si les conditions sont bonnes ou non. Il s'agit de deux lettres, une pour le côté gauche et une pour le côté droit. (E excellentes, G bonnes, M moyennes et P pauvres). comment char 400 Commentaires sur le parcours lat double Latitude géographique en degré décimal du début du parcours lon double Longitude géographique en degré décimal du début du parcours latEnd double Latitude géographique en degré décimal de la fin du parcours lonEnd double Longitude géographique en degré décimal de la fin du parcours lengthKm double Longueur de l'effort en km engin char 30 Immatriculation de l'avion utilisé pour le vol speed int Vitesse (km/h) lors de la capture altitude char 15 Altitude (feet) lors de la capture coordN char 15 Code EPSG du système de coordonnées dans lequel les valeurs de distance ont été calculées
-
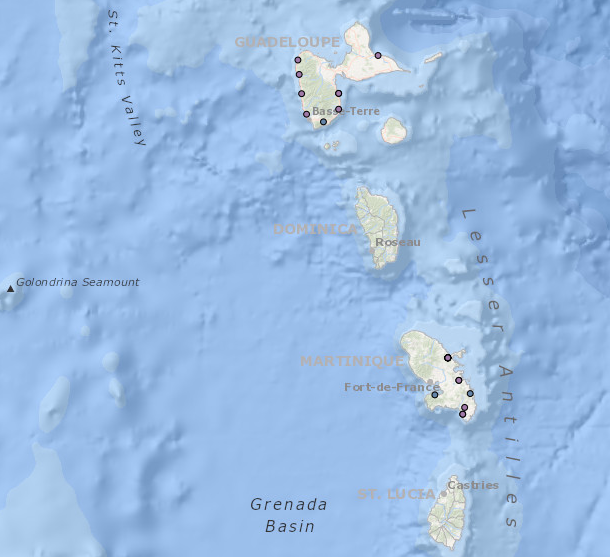
Données d’occurrence des échouages de mammifères marins collectées par les correspondants du Réseau National Echouages (date, position, espèce) en Outre-Mer en 2014-2020. cdNom: code de l'espèce observée selon taxref nomCite: nom latin de l'espèce observée selon taxref date_obs: jj/mm/aaaa, date de l'observation de l'animal échoué y: y en degrés décimaux de la commune de l'échouage x: x en degrés décimaux de la commune de l'échouage codeCommune: code de la commune de l'échouage selon l'INSEE nomCommune: nom de la commune selon l'INSEE identiteObservateur: nom du correspondant ayant effectué l'observation organismeObservateur: organisme du correspondant ayant effectué l'observation organismeGestionnaireDonnees: organisme assurant la gestion de la base de données